机器人领域的进步是由研究推动的,而研究又严重依赖有效的平台来测试机器人控制和导航算法。虽然过去几十年来已经开发出了许多机器人平台,但其中大多数都存在缺陷,限制了它们在研究环境中的使用。
加州大学伯克利分校的研究人员最近开发了BerkeleyHumanoid,这是一种新型机器人平台,可用于训练和测试人形机器人控制算法。在预印本服务器arXiv上发布的一篇论文中介绍了这种新型人形机器人,它解决并克服了之前推出的机器人研究平台的一些局限性。
“在对市售机器人进行过几次实验后,我们意识到了它们的一些弱点,”该论文的共同作者QiayuanLiao告诉TechXplore。“例如,一些机器人硬件非常昂贵,而其他硬件不是专门为基于学习的控制或研究而设计的,这通常意味着它很&luo;脆弱&ruo;,容易损坏,难以维护和修理。”
廖和他的同事最近研究的主要目标是开发更具成本效益和可扩展性的机器人研究平台。这些平台应成本低廉、研究人员易于制造和实验、不易发生故障、易于携带、几乎不需要维护,并且应由一名操作员即可管理。
“我们开发的平台,伯克利人形机器人,具有高性能、透明的低级执行器和传动装置、更高的可靠性,而且价格低廉,”廖解释说。我们通过从头开始设计和构建一切,包括其机械和电气部件,来实现这一点。”
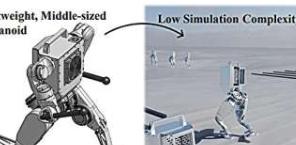
BerkeleyHumanoid是一款紧凑、低成本、轻便的机器人,可以轻松部署在机器人实验室中。其定制的机械部件包括变速箱和执行器,以及各种肢体和身体部位。另一方面,其电气部件是电机驱动器和惯性测量单元(IMU)模块。
研究人员通过一系列测试测试了他们的机器人平台,并证明它可以有效地处理各种运动任务,即使是在基于基本学习的策略控制下也是如此。凭借这一简单的策略,机器人能够在不同的地形上行走,单腿和双腿跳跃,并在城市和未铺砌的地形上长距离行走。
“我们推出了一款高性能、可靠、低成本的新型人形机器人研究平台,并展示了基于简单学习策略的惊人运动任务,”廖说。“伯克利人形机器人专为学术研究而设计,而非直接部署到工业界。我们希望加速算法开发和实验验证。”
初步测试凸显了BerkeleyHumanoid的巨大潜力,表明它可以支持各种运动方式的动态行走,同时还能在不同类型的地形上保持稳定性。该平台很快将在伯克利和其他机器人研究实验室中用于训练和测试机器人控制和导航的新算法。
“我们现在希望为我们的机器人添加手臂,让机器人能够进行与操控相关的研究,”廖补充道。“作为我们下一步研究的一部分,我们还希望使用摄像头添加感知能力,以实现更好的性能。”