增强智慧城市精确的3D传感器网络监控的新方法
智慧城市对于可持续的城市发展至关重要,因为它们通过先进的传感器网络和数字通信系统管理不断增长的人口。智能监控是这些城市的一项关键服务,可监控室内和室外环境。例如,它可以通过预测和告路口可能发生的事故来提高自动驾驶汽车的道路安全性。在室内,它通过在紧急情况下自动通知当局来支持弱势群体。
摄像头和激光雷达(LiDAR)传感器通常用于智能监控。LiDAR传感器提供没有颜色的三维(3D)视觉信息。由于LiDAR依靠激光反射,因此物体后面会留下盲点,难以检测到所有监控区域。可以通过在不同位置安装多个LiDAR传感器网络来解决此问题,从而增加每帧可获取的点数。
然而,这又带来了另一个问题:LiDAR传感器网络有限的网络带宽无法支持所有新增点的实时数据传输。先前的研究提出了一种数据选择方法,仅将三维空间中重要的区域的数据传送到服务器。然而,这些研究并没有详细说明如何在点云中准确地定义和估计这些重要区域。
为了解决这一差距,由芝浦工业大学电气工程与计算机科学研究生院硕士生KentaAzuma领导的研究小组开发了一种新方法,可以准确估计3D传感器网络中的重要区域。
“在本研究中,我们利用基于多个空间度量创建的空间特征来估计重要区域。重要区域取决于任务。例如,对于检测事故多发点,重要区域是移动物体(如人和车辆)可能所在的空间。我们的方法可以准确地识别此类区域,”Azuma解释道。
该团队还包括芝浦工业大学的RyoichiShinkuma教授,以及NEC公司安全系统平台研究实验室的KoichiNihei和TakanoriIwai。他们的研究于2023年4月1日发表在《IEEE传感器杂志》上。
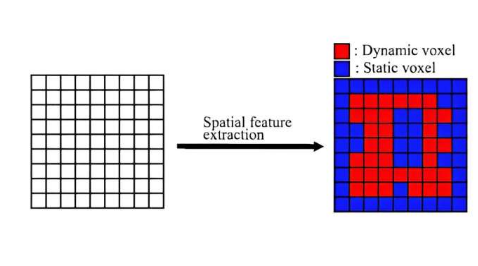
研究人员将点云划分为称为体素的小区域。重要的区域称为动态体素,代表人们经过的区域。其他区域称为静态体素,包括人们不会经过的墙壁和天花板区域。
“为了准确估计这些重要区域,必须使用多个空间度量来创建空间特征(SF)。我们使用两种类型的空间度量来创建SF:时间度量和统计度量,”Azuma详细说明。时间度量基于LiDAR传感器随时间获取的点数的长期变化,而统计度量表示每帧点数的差异。
该团队通过实验进一步评估了使用这些指标估计重要区域的准确性。他们研究了三种室内人员移动场景中多个LiDAR传感器获取的点云数据,发现使用这两个指标识别动态体素的准确率比单独使用其中一个指标高出10%。
此外,他们还利用机器学习来确定使用这两个指标对动态体素进行分类的最佳阈值组合。结果表明,使用这些阈值获得的准确度与实验中使用的最佳值相当。他们还确定,将体素的大小从1米增加到1.25米会降低准确度。
研究结果强调了使用多种指标准确评估重要区域的实用性。“我们的研究有可能显著提高自动驾驶系统的安全性和效率。对于送货机器人来说,识别碰撞风险高或拥堵风险大的地点将有助于规划高效的送货路线,从而减少时间和成本。这也有助于解决物流行业的劳动力短缺问题,”Azuma总结道。
总体而言,这种创新方法有望使智慧城市更加安全、更加高效。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。