根据生物物质的物理特性调整自推进机器人的运动
机器人正成为我们生活中越来越重要的一部分,它们从事着对人类来说过于危险的工作。这通常涉及在复杂环境中导航,而刚性自主机器人则很难做到这一点。当这些机器人被小型化并用于模拟生命物质的物理特性时,它们也面临着类似的挑战。
这些挑战可以通过一种能够像生物一样移动并能像细胞生物一样对环境信号做出反应的机器人来应对。要通过实验模拟此类系统,必须开发一种可以复制类似生命的动态的可调系统。
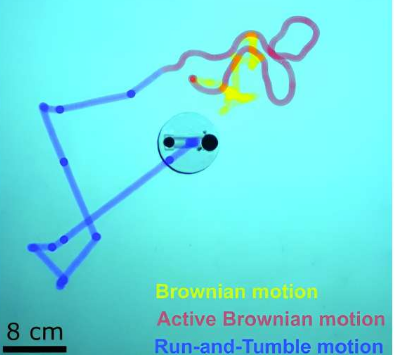
在《欧洲物理学杂志E》的一篇新论文中,包括印度理工学院孟买分校的NitinKumar及其合著者在内的作者描述了一种在自推进机器人装置中产生可调主动动力学的方案的开发。结果是一个两轮机器人,它利用一个简单的差速驱动机制,能够通过精确控制实现一系列复杂的主动动力学。
“在我们的研究中,我们开发了一种厘米大小的机器人,能够模仿典型活粒子的复杂特征。该机器人表现出的非平衡动力学与既定的理论模型非常吻合,”库马尔说。“它还可以使用机载透视 (IR)和光强度传感器适应环境线索,从而使它们成为阐明控制活体系统的物理定律的理想系统。据我们所知,这种级别的明确演示尚未在此类机器人设备中展示过。”
研究人员介绍说,到目前为止,为了用机器人解决活性和生命物质的物理学挑战,研究人员主要使用六角虫,即几厘米长、虫形的振动粒子,但这些系统存在明显的缺陷。
“Hexbug缺乏可编程性、速度控制以及根据物理障碍或光强度改变运动的能力,”Kumar补充道。“我们相信,凭借其先进的能力,我们的机器人可以探索活性和生物物质中更为复杂的问题。”
目前,该团队正在利用它们对活性和生命物质进行一系列科学实验。
“此外,它们还可以轻松修改和编程,以执行半自主动力学,使它们能够有效地穿越充满物理障碍的复杂地形,”库马尔总结道。“我们相信,这种机器人设备将在提高我们对生命和活动系统的理解方面发挥重要作用。”
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。