事实证明,机器人是完成复杂且高要求的维护任务的有前途的工具。虽然工程师们开发了各种可以帮助维护和修复基础设施的机器人,但其中许多机器人需要插入外部电源,这限制了它们的实际应用。
马克斯普朗克智能系统研究所、哈尔滨工业大学和香港科技大学的研究人员最近开发了一种新型微型机器人,可以在不依赖外部动力源的情况下穿过管道和其他管状结构。《科学机器人》杂志上发表的一篇论文介绍了这款机器人,它可以帮助有效解决复杂的维护问题,同时最大限度地减少对管道的损坏。
该论文的合著者WenqiHu告诉TechXplore:“能够在流体流动的管状结构中导航的毫米级机器人在核、工业和医疗应用中具有巨大的检查、维护或修理潜力。”“然而,对外部供电的普遍依赖限制了它们的操作范围和适用环境。”
许多先前提出的维护机器人比依赖电力的同类机器人更大,只能运行有限的时间,并且功能较少。胡和他的同事着手开发一种微型机器人,它包括一个内部电源和一个驱动单元,以受控的方式利用其可用能量。
这可以让它在管状结构内覆盖更远的距离,并长时间执行日常维护任务,而不会耗尽能量。
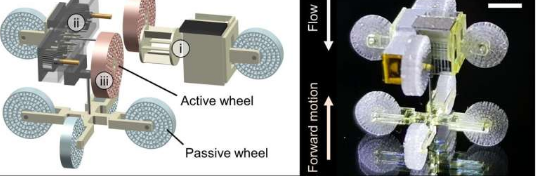
“我们的机器人包含三个关键组件:用于利用流体动力的流体动力模块、用于将转换后的机械能传输到机器人运动系统的双输出微型变速箱,以及用于在复杂管道中自适应运动的剪纸软轮,”胡解释道。
“所提出的流量驱动管式毫机器人在复杂管道中为不同的应用提供可控的上/下游长距离导航。”
胡和他的合作者创造的轮式毫米级机器人有一个内部叶轮,可以将管状结构中的流体流动转化为机械能。此外,可以简单地通过施加外部磁场来调制其移动方向。
胡说:“我们的机器人满足了需要长距离导航的应用需求,以及在充满流动气体或液体的有限管状结构内执行长期任务的能力。”
研究人员通过一系列初步测试评估了他们的机器人,发现它取得了有希望的结果。作为下一步研究的一部分,他们计划进一步提高其功能和稳定性,以促进其未来在现实环境中的部署。
“目前,平衡作用在机器人身体上的流阻的锚定力是由轮子摩擦力提供的,”胡补充道。
“为了确保在高流速(>1m/s)的管道或石油管道等低摩擦表面的稳定运动,简化机器人主体以最大限度地减少流动阻力或在轮子表面添加微结构以增加摩擦可能是有效的。
“此外,机器人的运动状态切换受到外部磁场工作距离的限制。为了解决这个问题,未来的机器人将配备机载微型电池、执行器(例如形状记忆合金)以及微驱动和通信电路实现远距离远程控制。”