MetaAI、斯坦福大学、Technische、德累斯顿大学和德国癌症研究中心(DFKZ)的研究人员最近开发了DIGITPinki,这是一种可以检测触觉信息的微型传感器。该传感器在预印本服务器arXiv上发布的一篇论文中介绍,可以集成到新的医疗技术和机器人系统中。
“这篇论文始于与RobertoCalandra和MikeLambeta在MetaAI的研究实习,但最终发展成为Meta、斯坦福大学、德累斯顿工业大学和德国癌症研究中心(DFKZ)之间的研究合作,”JuliaDi博士说-该论文的作者告诉TechXplore。
“我们主要对机器人数字化触摸科学感兴趣。通过DIGITPinki,我们希望研究如何构建具有与人类相似的触摸功能但具有人类手指形状因素的传感器。”
Di和她的同事创建的DIGITPinki传感器基于近年来推出的触觉传感器设计,例如DIGIT和OmniTact传感器。然而,为了创造他们的设备,Di和她的同事还重新审视了20世纪80年代引入的旧设计理念,包括S.Begej的一篇开创性论文中概述的设计理念。
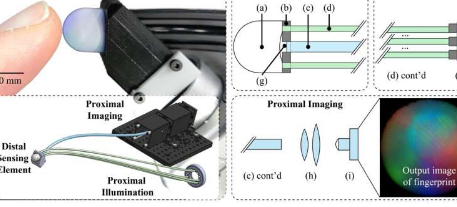
“DIGITPinki是一种基于视觉的触觉传感器,它使用微型相机的图像来获得触觉,”Di解释道。“通常,这类传感器由光学透明的凝胶指尖组成。当这些凝胶指尖接触物体或环境时,带有灯光的内部摄像头将拍摄凝胶中由此产生的变形的图像。”
研究人员根据传感器凝胶变形来训练机器学习算法,这种变形是传感器与物体接触时产生的。经过训练的算法可以从传感器收集的图像数据中准确地学习触觉信息,例如与物体的接触力。然后,机器人或设备可以使用这种触觉信息来完成操作任务。
“我们的创新是通过使用光纤束将图像传输到远程摄像机来缩小传感器,类似于早期内窥镜使用光纤束进行成像的方式,”Di说。“通过将电子器件从凝胶指尖移开,我们可以大幅缩小凝胶指尖。这种设计的好处之一是凝胶指尖是非磁性的并且不含电子器件,这对于医疗应用中的任何任务(例如体内)来说都是一个福音或者在MRI机器中。”
该研究小组最近的工作证明了使用光纤束小型化基于视觉的触觉传感器的可行性。根据他们提出的设计,Di和她的同事创建了一个尖端直径为15毫米的原型传感器,这大约是女性食指指尖的平均大小或男性食指底部5%的大小。
值得注意的是,这种人造传感指尖由硅胶制成,不含敏感的电子或磁性元件。这意味着它可以安全地引入人体,因此可能对医疗应用有吸引力。
“纤薄、灵敏的传感器的一个实际应用是在有限空间内进行癌症诊断,例如,常规直肠或宫颈检查中的数字触诊,”Di解释道。“由于癌症结节比健康组织稍硬,临床医生可能会用指尖感觉到癌性生长作为诊断方法。
“在论文中,我们提出了初步结果,显示DIGITPinki能够区分医疗级模型(真实组织的模拟)和离体后前列腺组织(在临床检查过程中感觉到的前列腺部分)上的健康组织和不健康组织)”。
该团队的初步测试结果表明,DIGITPinki可用于开发新的医疗技术,包括可以检测人体内组织异常的设备。此外,该传感器还可用于开发新的机器人系统,例如纤细而灵敏的人造指尖,使机器人能够更灵活地操纵物体,甚至使用剪刀或其他需要在受限位置施加受控力的工具。
“在不久的将来,我们正在努力将这项技术扩展到其他医疗应用,例如触诊子宫颈,”迪补充道。“如果假手上也有这种高度敏感的指尖,那将是令人兴奋的。我们也有兴趣发现如何使用人工智能来解释触摸信号以进行操作。”