我们通常在走路时不会考虑它,但步行是一项复杂的任务。在我们的神经系统的控制下,我们的骨骼、关节、肌肉、肌腱、韧带和其他结缔组织(即肌肉骨骼系统)必须协调运动,并以高效的方式以不同的速度响应意外的变化或干扰。在机器人技术中复制这一点绝非易事。
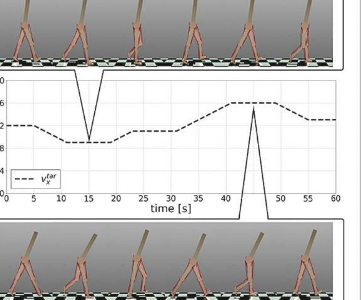
现在,东北大学工程研究生院的一个研究小组使用肌肉骨骼模型复制了类似人类的变速行走,该模型由反映人类神经系统的反射控制方法引导。生物力学和机器人技术的这一突破为理解人类运动树立了新的基准,并为创新机器人技术铺平了道路。
“我们的研究解决了以不同速度复制有效步行的复杂挑战,这是人类步行机制的基石,”与ShunsukeKoseki和MitsuhiroHayashibe教授共同撰写该研究的副教授DaiOwaki指出。“这些见解对于突破理解人类运动、适应和效率的界限至关重要。”
这一成就归功于创新的算法。该算法超越了传统的最小二乘法,并帮助设计了一种对不同步行速度下的能源效率进行优化的神经电路模型。
对这些神经回路的深入分析,特别是那些控制腿部摆动阶段肌肉的神经回路,揭示了节能行走策略的关键要素。这些启示增强了我们对支撑人类步态及其有效性的复杂神经网络机制的理解。
Owaki强调,研究中发现的知识将有助于为未来的技术进步奠定基础。
“在肌肉骨骼模型中成功模拟变速行走,结合复杂的神经电路,标志着神经科学、生物力学和机器人技术融合的关键进步。它将彻底改变高性能双足机器人、先进假肢的设计和开发,以及最先进的动力外骨骼。”
这些发展可以改善残疾人的移动解决方案,并推进日常生活中使用的机器人技术。
展望未来,Owaki和他的团队希望进一步完善反射控制框架,以重现更广泛的人类步行速度和动作。他们还计划应用研究中的见解和算法来创造更具适应性和节能的假肢、动力套装和双足机器人。这包括将已识别的神经回路集成到这些应用程序中,以增强其功能和运动的自然性。