为了最好地在周围环境中移动并处理日常任务,机器人应该能够执行复杂的运动,有效地协调各个肢体的运动。因此,机器人学家和计算机科学家一直在尝试开发计算技术,以人工复制人类计划、执行和协调不同身体部位运动的过程。
英特尔实验室(德国)、伦敦大学学院(英国伦敦大学学院)和 VERSES 研究实验室(美国)的一个研究小组最近开始利用分层生成模型、组织数据变量的计算技术来探索自主机器人的运动控制分为不同的级别或层次结构,然后模仿特定的流程。
他们的论文发表在《自然机器智能》上,展示了这些模型在自主机器人中实现受人类启发的运动控制的有效性。
“我们最近的论文探讨了如何从生物智能中汲取灵感来形式化机器人学习和控制,”该论文的通讯作者李志斌 (Alex) Li 告诉 Tech Xplore。
“这允许在连贯的框架内进行自然的运动规划和对机器人运动的精确控制。我们相信运动智能的进化并不是不同能力的随机组合。我们的视觉皮层、语言皮层、运动皮层和运动皮层的结构等等,有一个更深层次和结构方面的原因,为什么这种连接不同神经路径的机制可以有效且高效地工作。”
李志斌 (Alex) 副教授和著名神经科学家 Karl Friston 教授 (FMedSci FRSB FRS) 最近的研究从神经科学研究中汲取灵感,特别是目前已知的人类生物智能和运动控制。该团队以人脑为参考,开发了软件、机器学习和控制算法,可以提高自主智能机器人可靠地完成复杂日常任务的能力。
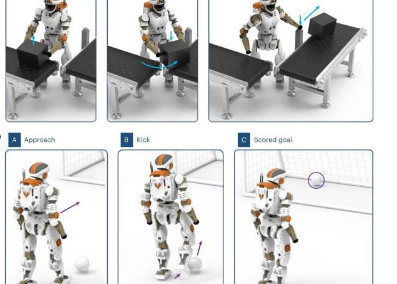
“在本文中,我们通过广泛的模拟证明了这一点,其中全身人形机器人能够在仓库环境中运输箱子、打开门、操作设施(例如传送带)、踢足球,甚至继续操作在机器人身体受到物理损坏的情况下,”李说。“我们的研究展示了自然的力量,我们大脑中不同皮层如何协同工作的灵感可以帮助智能机器人大脑的设计。”
与其他分层生成模型一样,李和他的同事开发的技术通过将任务组织成不同的级别或层次结构来工作。具体来说,该团队的模型将一项任务的超范围目标映射到不同时间尺度下个体肢体运动的执行上。
“生成模型预测不同动作的后果,从而帮助解决不同类型/级别的规划并正确映射不同的机器人动作,这是相当困难和乏味的,”李解释道。
“例如,将一个箱子从一个地方搬运到另一个地方,自然会映射到一个全局的、粗略的走向目的地的计划,再加上更密切的监控和对平衡的精细控制,以及搬运箱子和放置箱子——所有这些使用我们的软件,这些复杂的协调将自然地同时发生。”
研究人员在一系列模拟中评估了他们的方法,发现它允许人形机器人自主完成一项复杂的任务,该任务需要多种动作,包括行走、抓取物体和操纵它们。具体来说,机器人可以在打开门并穿过门并踢掉足球的同时检索和运输盒子。
“我们最近的工作最显着的发现之一是,从大自然中获取灵感可能是一个非常好的起点,”李说。
“我们可以从与我们大脑相似的组织层面上获得灵感,并指导我们对机器人大脑的设计,而不是从头开始进行工程设计。有相当多的工程工作是独立于生物启发而发明的。然而,我们还没有智能机器人能够像我们一样聪明地完成工作,仅使用很少的能源,例如消耗面包和水。相反,如今,机器人使用巨大的能量和计算来完成简单的事情。
李和他的同事收集的初步发现非常有前景,凸显了分层生成模型将人类能力转移到机器人的潜力。未来对各种物理机器人的实验可能有助于进一步验证这些结果。
李补充说:“在人类历史的这一阶段,我们已经共同做了大量的工作来分别复制不同种类的人类水平的智能,相当于人脑的不同部分。” “现在,我们可以从生物大脑的结构和功能组织层面上汲取灵感,了解不同皮层如何相互协调。然后我们可以根据人脑在功能层面上的工作方式来设计人造大脑。”
该研究团队最近的工作有助于体现人工智能的持续努力,旨在使机器人的能力更接近人类的能力。李和他的同事计划继续实施他们提出的方法,以实现复杂任务的真实机器人运动技能,并最大限度地发挥其社会潜力。
“这项研究为我们指明了一条可行的道路,通过具体的物理机器人和能力来建立AGI(通用人工智能)作为一种新的生产力形式,在社会和政府的良好和积极的治理下,可以使我们的文明走向更加光明的未来。科学界,”李补充道。“在接下来的研究中,我们将继续努力实现这一目标。”