世界各地都使用无人水下航行器 (UUV) 在难以预测的恶劣条件下执行困难的环境、远程、海洋、防御和救援任务。
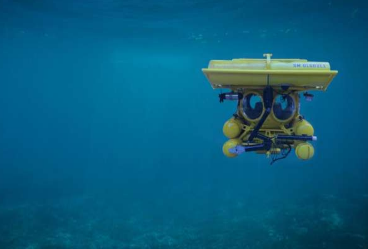
由弗林德斯大学和法国研究人员领导的一项新研究现已使用一种新颖的仿生计算人工智能解决方案来提高 UUV 和其他自适应控制系统的潜力,使其在波涛汹涌的海洋和其他不可预测的条件下运行更加可靠。
这种创新方法采用了生物启发体验重播 (BIER) 方法,已发表在IEEE Access杂志上。
第一作者 Thomas Chaffre 博士解释说,与传统方法不同,BIER 旨在通过利用不完整但有价值的近期经验来克服数据效率低下和性能下降的问题。
“研究结果表明,BIER 超越了标准的体验重播方法,在假设的 UUV 领域实现最佳性能的速度是后者的两倍。
“该方法表现出卓越的适应性和效率,展示了其在各种和具有挑战性的条件下稳定 UUV 的能力。”
该方法包含两个内存缓冲区,一个专注于最近的状态-动作对,另一个强调积极的奖励。
为了测试该方法的有效性,研究人员使用基于机器人操作系统(ROS)的 UUV 模拟器进行了模拟场景,并逐渐增加场景的复杂性。
这些场景的目标速度值和电流扰动的强度各不相同。
资深作者弗林德斯大学人工智能和机器人学副教授 Paulo Santos 表示,BIER 方法的成功有望增强需要动态自适应控制系统的各个领域的适应性和性能。
UUV 在测绘、成像和传感器控制方面的能力正在迅速提高,其中包括深度强化学习 (DRL),它正在快速提高对 UUV 可能遇到的水下扰动的自适应控制响应。
然而,当面对现实应用中不可预见的变化时,这些方法的效率会受到挑战。
水下环境的复杂动态限制了UUV机动任务的可观测性,使得现有的DRL方法难以发挥最佳性能。
BIER 的引入标志着在增强深度强化学习方法有效性方面迈出了重要一步。
研究人员得出结论,它有效驾驭不确定和动态环境的能力标志着自适应控制系统领域的一个有希望的进步。